We collect a dataset from 32 distinct corners across 5 buildings, which are constructed between 1906 and 1996 and renovated between 1973 and 2017.
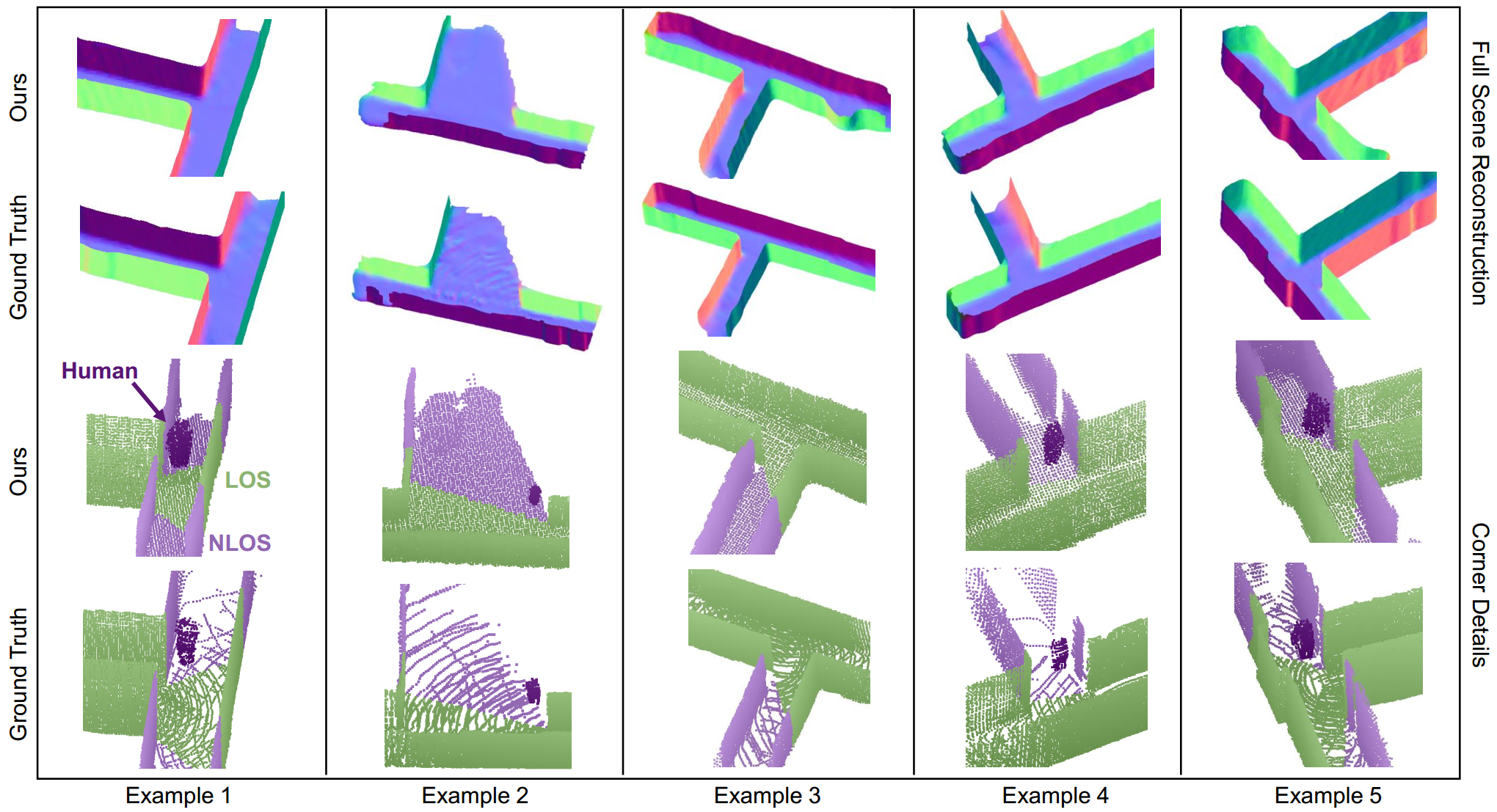
Our dataset includes diverse corner layouts, including 21 T-shaped, 5 L-shaped, 5 cross-shaped, and 1 oblique corner at 45°.
Corner width ranges from 1.33 m to 4.63 m, with a mean of 2.16 m and a standard deviation of 0.89 m.
In each corner, we positioned a human subject behind the corner, out of the direct LOS, to simulate realistic NLOS imaging conditions.
Both the human and the robot are free to move, leading to a total of 28k distinct RF heatmap scans.
We will release code and dataset to facilitate future research in this direction.